end of arm tooling definition
We need to liaise with the API team to figure out how these APIs work and when they change we dont know what changed. The end effector is also called Gripper and it.

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning
Regardless of the end-product the manufacturing principle is the same.

. Impl S Implementation REF of functionality for a type S eg methods. The Hexagon Romer Absolute Arm 6-Axis. For instance online retail platforms typically have at a minimum a webapp and mobile app as customer shopfronts a call center app as a support front-end and a store-management app as another front-end for store managers.
The NPComp project aims to provide tooling for compiling numerical python programs of various forms to take advantage of MLIRLLVM code generation and backend runtime systems. Renamed variables are supported in the Variables view Watch view and in the Debug Console REPL. Where this Specification uses technical terminology defined in the Glossary or otherwise that refer to enabling technologies that are not expressly set forth in this Specification those enabling technologies are EXCLUDED from the Scope of this Specification.
Work is reactive and done with ad hoc tool and process choices. Focus on best practices knowledge sharing and skills development to continue improving. When provisioning and deploying high-scale applications that are composed of highly decoupled microservices.
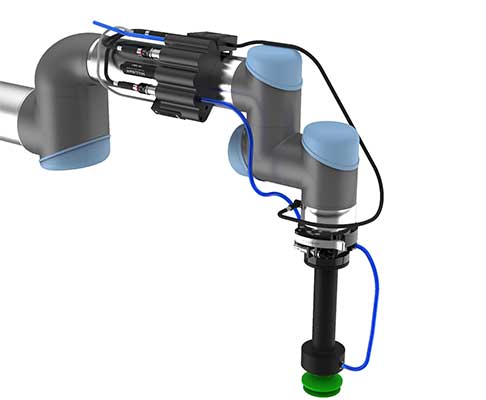
Organizations can use the DevOps maturity model as a guide to adoption. BK EX REF common behavior others can implement. In the case of a serial manipulator the robot end effector usually lies in the hardwares last link.
The choice for ultra-high accuracy probing of smaller items. The purpose of this mechanical part is subject to the robots application in the world. Impl T for S Disable an automatically derived auto trait.
We really dont know what were getting. A Robot End effector is a mechanical part attached to the end of the robot arm hardware that is intended for direct interaction of environment and adjacent. If the cluster defines multiple node types youll need to update the definition of each corresponding virtual machine scale set.
The choice optimized for portable probing. Polyurethane foams are used in many automotive applications including seating head and arm rests and headliners. Update the virtual machine scale set.
The Hexagon Romer Absolute Arm Compact. To meter the liquid isocyanate and resin blend at a specified stoichiometric ratio mix them together until a homogeneous blend is obtained dispense the. Updating the definition of the Service Fabric node extension under the virtual machine resource.
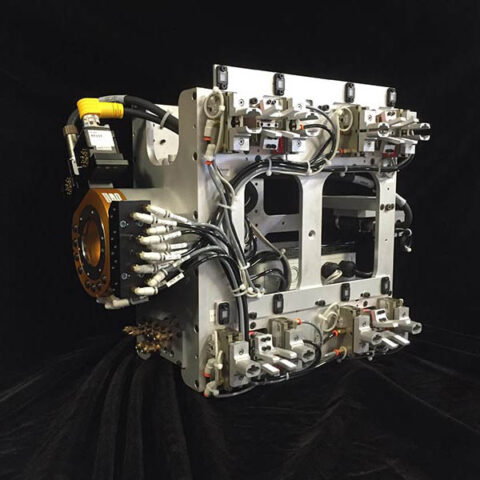
The most essential robot peripheral is the end effector or end-of-arm-tooling EOAT. Detailed examples are included here. This tutorial shows how to provision and deploy an application composed of microservices in Azure App Service as a single unit and in a predictable manner using JSON resource group templates and PowerShell scripting.
The Hexagon Romer RS6 Laser Scanner. Even though end-to-end responsibility helps the cause of outcome-orientation it is often unrealistic given the shape of systems. In this article.
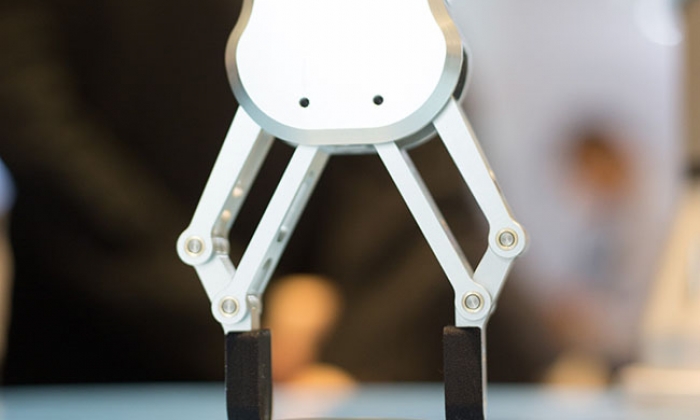
For clarity enabling technologies not disclosed with particularity in this Specification eg. Common examples of end effectors include welding devices such as MIG-welding guns spot-welders etc spray guns and also grinding and deburring devices such as pneumatic disk or belt grinders burrs etc and grippers devices that can grasp an object. Trait T Define a trait.
In addition to providing a bridge to a variety of Python based numerical programming frameworks NPComp also directly develops components for tracing and compilation of. R T is subtrait of supertrait BK EX REF RAny S must impl R before it can impl T. The RS6 is a productivity machine that makes the Absolute Arm more powerful than any other portable measuring arm on the.
Impl T for S Implement trait T for type S. Fortunately this is very easy the same GCC that you know and love is available for the various ARM Cortex-M platforms and so are all of its accompanying programs like GDB. Updating the cluster resource definition.
Optimize tooling and technologies identifying roadblocks and gaps that affect your KPIs. Reveal hit breakpoint in the BREAKPOINTS view. You can check whether your tooling emits renames by looking for a non-empty names array in the sourcemap files it generates.
When the front-end gets JSON from an API. Arm-none-eabi-gcc Before we start writing a program for the chip we need to have a toolchain for compiling and debugging.

Sophisticated Grippers And End Of Arm Tooling Eoat For Robots Melss

Get A Grip Eoat Considerations For Collaborative Robots Y Blog
End Of Arm Tooling Eoat By Robotic Automation Systems

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning
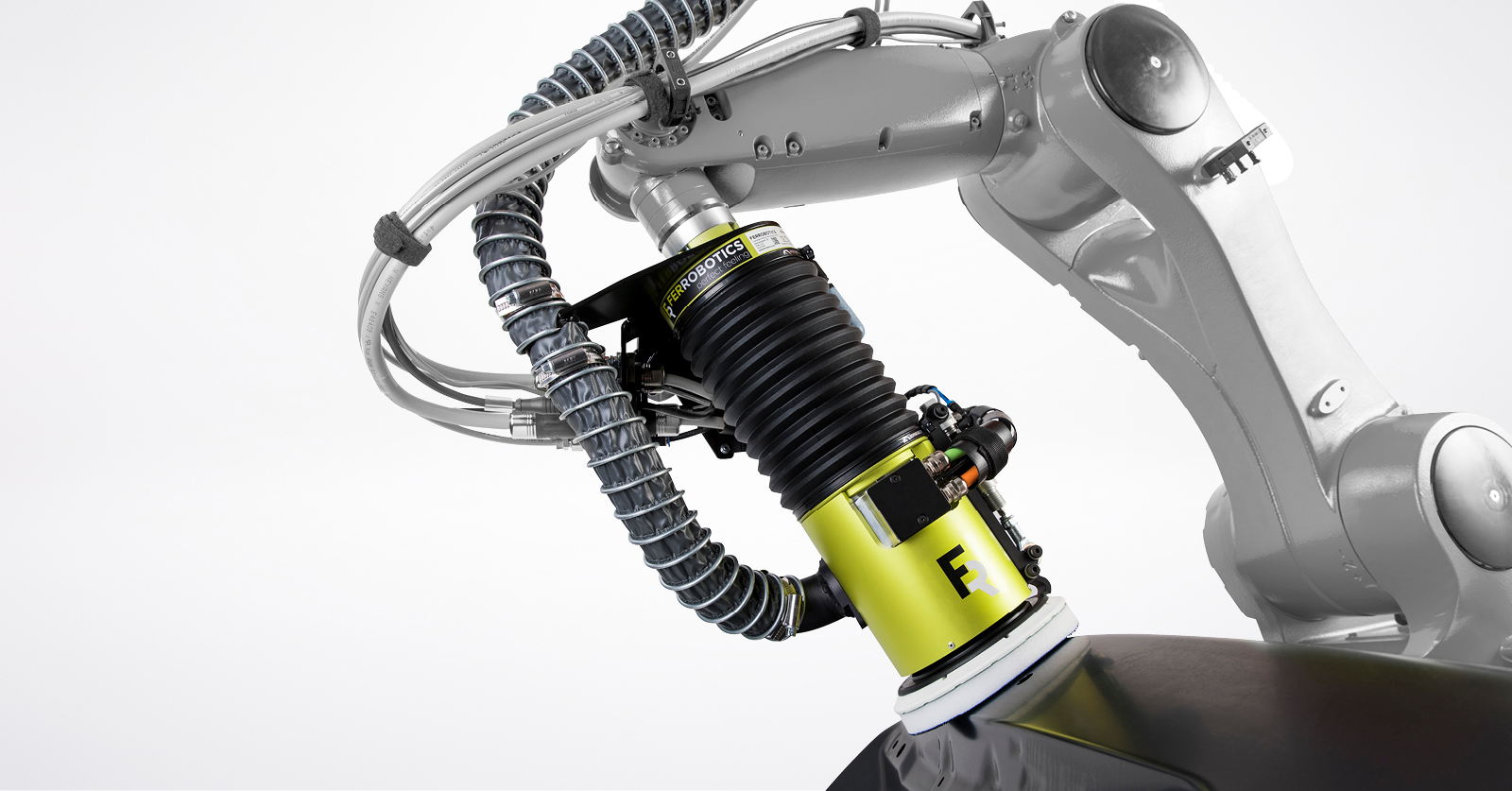
What Is An End Effector And Or End Of Arm Tool Eoat Ferrobotics

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning

Practical Use Of End Effectors Onrobot
What Is End Of Arm Tooling For Robots Onrobot

End Of Arm Tooling Robot End Effectors Millibar Robotics

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning

Robotworx Selecting End Of Arm Tooling

8 Types Of End Of Arm Tooling Devices Grippers Keller Technology
End Of Arm Tooling Eoat By Robotic Automation Systems

Eoat Meaning Types Magnetic Gripper Manufacturer Hvr Mag
End Of Arm Tooling Eoat By Robotic Automation Systems
End Of Arm Tooling Robot End Effectors Millibar Robotics

4 Robot End Of Arm Tooling Inlearc

What Is End Of Arm Tooling Eoat In A Robot Eoat Meaning
What Is An End Of Arm Tool Eoat In A Robot Youtube